
Hello Friends,एक Robotic Arm जो की Arduino uno से 5 servo motors को 5 Potentiometer से control करके बनाई www.mechanic37.com पर visit करने के लिए thanks रोबोटिक आर्म 2016 में बनाया था और इस पेज को भी उसी समय लिखा था अभी मैं से अपडेट कर रहा हूं कोई गलतियां हो तो कमेंट में जरूर बताएं इसका नेक्स्ट वर्जन के लिए ही आप बोल सकते हैं सबसे आखरी में इसकी टेस्टिंग वीडियो भी है
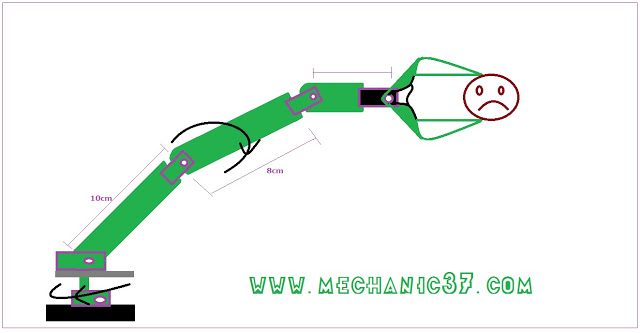
इस robotic arm के लिए Potentiometer से remote बनाया Potentiometer की knob को rotate करने पर robotic arm की Arm और elwo,solder अपना angle change करेंगी ऐसी स्थिति में robotic arm का control पूरा हमारे हाथो में होगा जैसा की crane machine में होता है यह एक three axis Robotic arm है और इस diagram में robotic arm का side view है
Robotic Arm बनाएं | Step by Step
मटेरियल इक्कठा करें
Gripper-How to make A gripper
5x Servo Motor (micro servo)
5x Potentiometer
Jumper wire
Bread bord
10×2 c.m, 8×2 ply board
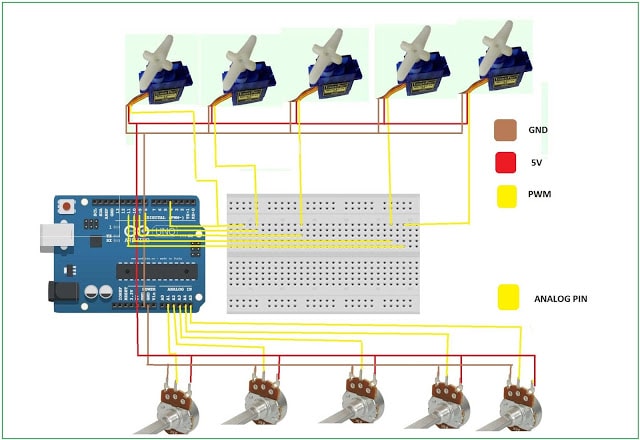
सर्किट बनाएं
Robotic Arm का रिमोट बनाएं

Robotic Arm प्रोग्राम करें
पहली servo को A से और potentiometer को potpinA से दिखाया गया है
प्रोग्राम या स्केच नीचे दिया है देखिये
रोबोटिक आर्म की ढांचा बाएं
ग्रिपर बनाएं



इस Program Arduino Uno में अपलोड करें |
यह प्रोग्राम इस रोबोटिक आर्म के लिए बनाया गया है जिससे यह रिमोट से कंट्रोल हो नीचे दिए गए प्रोग्राम को आपको Arduino uno में अपलोड करना है यदि आपको नहीं पता कि कैसे करते हैं तो यह पढ़ें – Arduino में प्रोग्राम या स्केच अपलोड कैसे ?
#include <Servo.h>
Servo servoA;
Servo servoB;
Servo servoC;
Servo servoD;
Servo servoE;
int potpinA = 1;
int potpinB = 2;
int potpinC = 3;
int potpinD = 4;
int potpinE = 5;
int val;
void setup()
{
servoA;.attach(5);
servoA;.attach(6);
servoA;.attach(9);
servoA;.attach(10);
servoA;.attach(11);
}
void loop()
{
val = analogRead(potpinA);
val = map(val, 0, 1023, 0, 180);
servoA.write(val);
delay(15);
val = analogRead(potpinB);
val = map(val, 0, 1023, 0, 180);
servoB.write(val);
delay(15);
val = analogRead(potpinC);
val = map(val, 0, 1023, 0, 180);
servoC.write(val);
delay(15);
val = analogRead(potpinD);
val = map(val, 0, 1023, 0, 180);
servoD.write(val);
delay(15);
val = analogRead(potpinE);
val = map(val, 0, 1023, 0, 180);
servoD.write(val);
delay(15);
} Robotic Arm की टेस्टिंग
रोबोटिक आर्म बनाना सीखना आपको अच्छा लगा हो और आपके पसंद आया हो तो उसे शेयर जरूर करें नीचे बटन है
Modify & tips(Next update)
इस simple robotic arm के साथ आगे हम Infra red sensor या ultrasonic sensor लगायेंगे जो की object और distance ditect करके बिना remote के काम करेंगे use हम full programmable robotic arm कह सकेंगे
Mechanic37.com की ये blog post read करने के लिए thanks मैंने अपनी Robotic Arm लिए micro servo का use किया यदि आप micro servo से बड़ी servo motor use करेंगे तो आपकी robotic arm ताकतवर होगी जिससे आप अपनी servo motor के हिसाब से किसी चीज को एक जगह से दूसरी जगह उठा कर रख सकते है
अब जब आप Robotic arm बना रहे हो तब इसके लिए base स्टेंड का वजन ज्यादा रखें क्योंकि यदि base स्टैंड कम वजन का होगा तो robotic arm बाइब्रेट कर सकती है और संवेग का मान बढ़ने और vibration की वजह से servo motor के गियर टूट सकते है और servo motor बेकार हो सकती है और आपका loss हो सकता है मैंने अपनी रोबोटिक आर्म के लिए एक पुरानी हार्ड डिस्क का यूज किया है
Readers यदि ये projects आपको पसंद आया हो तो इसे अपने friends के साथ facebook,twitter,google+ पर share जरूर करें और mechanic37.com की हर एक new post अपने email पर पाने के लिए उपर subscription box से subscribe करे
और आप को कोई भी problem हो या कोई सुझाव हो तो उसे comment कर के बतायें
Leave a Reply